The Swan Creek Railroad
NOTE: This article is reprinted with revisions, from the Division 1, NCR NMRA newsletter, the “Train Order”, Vol #98 February 2025 While looking at historical…

Shoebox Layout Ideas
In Episode 47 of the Cartel Conversations Podcast, the hosts, Ian Holmes and Tom Conboy, introduced the 2024 Micro Model Railway Cartel Challenge. For 2024…

Pizzatopia – an HOn30 Micro Layout
For the last couple years, the e-magazine The Micro Model Railway Dispatch and the Facebook group Micro Model Railroad Cartel have been hosting an annual…

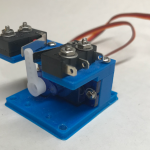
SERVO MOUNTING BRACKETS ARE BACK!
After some work on the site, I have the servo mounting brackets available again. The old plugin just stopped working and would take the whole…

Small Layout Meet 2023
Back in June I managed to take time to travel to Findlay and the 2023 Small Layout Meet. While there I tried to video document…

Website Issues (again)
I recently had an issue with the eCommerce software I have been using to sell the Servo Brackets. The website kept working to the public…

Jackson Belt Line, a Small Prototype for Any Era – Part I
Where is the Jackson Belt Line? Although it has “belt line” in the name, the Jackson Belt Line is more of a short industrial branch…
Small Layout Meet 2023
The Small Layout Meet is Back! June 17, 2023, 10AM – 4PM Northwest Ohio Railroad Preservation, INC12505 C.R. 99Findlay, OH 45840 The meet will be…

Roundup Time! – How Green is Your Railroad?
While doing research on older prototype railroad scenes from the 1970s and before, it is hard not to notice how green many of the old…

SmallMR.com is back!!
Well after a month hiatus, I finally have a new server in place and the website is back up and running. The old server had…